|
I Schéma de principe
d'un système asservi : b )
Comportement du système asservi : c )
Réponse à des entrées types : II Fonctions de
correcteurs (PID) : |
|
I Schéma de principe
d'un système asservi : b )
Comportement du système asservi : c )
Réponse à des entrées types : II Fonctions de
correcteurs (PID) : |
|
Les systèmes asservis représentent une classe particulière de systèmes de commande. Ils se caractérisent par leur principe de fonctionnement basé sur une boucle qui se ferme sur une comparaison entre la valeur souhaitée et la valeur réelle. L'étude des systèmes asservis se conduit d'une manière particulière. Il ne convient pas d'isoler la partie commande de la partie opérative mais plutôt d'étudier globalement le comportement de la chaîne fonctionnelle (PO + PC). Les systèmes étudiés sont monovariables,
c'est-à-dire qu'ils ont pour but d'asservir (de commander) une seule grandeur
appelée sortie. Cette grandeur dépend de l'évolution d'un grand nombre
de variables du système :
I
Schéma de principe d'un système asservi :
a ) Définition :On appelle système asservi ou asservissement un système bouclé présentant une amplification de puissance dans la chaîne directe. L'outil de description fonctionnelle des systèmes
asservis est le schéma bloc. Sur le schéma fonctionnel on peut remarquer :
b ) Comportement
du système asservi :
En phase de spécification ou en phase de mesure des
performances, l'étude des comportements d'un tel système pose un problème
particulier de définition. En effet ce comportement dépend de la manière dont
varie l'entrée du système, or on ne peut envisager de traiter tous les cas
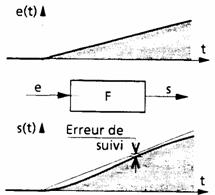
d'entrée possibles c ) Réponse à des entrées types :Dans le cas des systèmes asservis on distingue quatre
entrées types qui permettent de définir les principaux critères quantitatifs
de performances.
Deux paramètres apparaissent sur le graphe de sortie:
Ce type de comportement est en fait très dangereux
dans la pratique, il faut donc s'en affranchir de manière sûre. D'une manière générale, plus le coefficient d'amplification de la chaîne directe (gain) est grand plus le danger d'instabilité est fort. On peut donc réduire sa valeur afin de s'éloigner de ce danger potentiel, mais ceci se fera au détriment d'autres performances.
Remarque
: cette erreur entre la valeur demandée à un instant et la valeur réelle ne
peut s'annuler, car cela signifierait que le système connaît la variation
future de l'entrée.
De plus ces méthodes fréquentielles sont très
utilisées pour l'étude de systèmes asservis électriques : régulation de
courant par exemple. II
Fonctions de correcteurs (PID) :
a ) Notion de correction :Le comportement global d'un système asservi dépend de la nature des blocs présents dans la boucle, il est donc intéressant d'introduire dans cette boucle un bloc paramétré (comprenant des paramètres réglables) facile à réaliser, qui permette de modifier le comportement du système, on appelle classiquement ce bloc : "correcteur". Dans le cas le plus simple, on place ce bloc de correction dans la chaîne directe, juste en sortie du comparateur pour les raisons suivantes :
b ) Critères de performances1. STABILITÉ
Un système asservi
pouvant présenter le danger d'être instable, la stabilité est une condition nécessaire de comportement. Définition : un système est stable si, lorsqu'il est
écarté d'une position d'équilibre par une cause passagère, il reprend sa
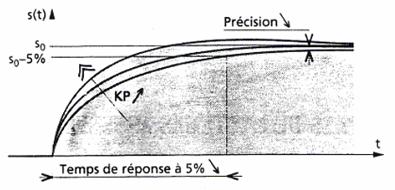
position de départ quand cette cause disparaît. 2. PRÉCISION
La précision d'un système est une donnée de base de
son comportement, elle peut être spécifiée dans le cahier des charges de
celui-ci. La précision statique peut se mesurer par la réponse du système à un échelon. 3. RAPIDITÉ
Ce critère peut s'avérer important pour les systèmes
présentant une grande dynamique, c'est-à-dire ceux qui sont soumis à des
variations brutales et continues de la consigne. La rapidité, le plus souvent déterminée par le temps
de réponse à 5%, peut se mesurer par la réponse du système à un échelon. c ) Paramètres influants sur les performances
1. P comme PROPORTIONNELLe paragraphe I a montré l'importance de la fonction amplification dans le fonctionnement des systèmes asservis, le réglage de la valeur de cette amplification dépend de l'adaptation technologique entre les constituants de commande et les actionneurs du système. Le correcteur introduit un autre coefficient,
généralement appelé KP. Cette variable permet d'ajuster la valeur du gain G
de la chaîne directe. La relation entre ces différents coefficients
d'amplification est donc : G = gain
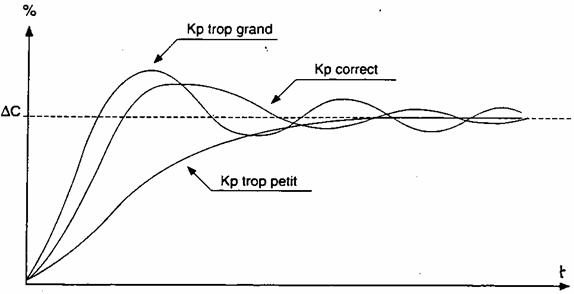
de la chaîne directe L'influence d'une variation de KP - et donc l'influence d'une variation du gain de la chaîne directe - est essentielle sur les critères de performances définis ci-dessus.
système et peut donc conduire à des dépassements et
même à un comportement instable. Le réglage des paramètres de correction est
l'art du compromis. Généralement, le réglage par le gain seul permet d'obtenir des résultats satisfaisants, si le comportement n'est pas acceptable, on peut faire intervenir d'autres paramètres. 2. D comme DÉRIVELa commande de type proportionnelle ne tient pas
compte du sens de variation de la grandeur à piloter. Or, on sent bien que
pour une même valeur de l'écart la commande doit être différente si celui-ci
est en train d'augmenter ou au contraire en train de baisser. Ce type de
comportement est très naturel pour un humain : il s'agit de l'anticipation. L'introduction de cette correction dérivée modifie les
performances précédentes et donc les réglages de correcteur à plusieurs
paramètres (PD) sont à pratiquer globalement. 3. I comme INTÉGRALLe troisième paramètre intervient essentiellement sur la précision. Il est important de connaître les comportements réels
des systèmes par l'analyse de la réalité et par la connaissance intuitive des
relations de causalité entre les performances et les paramètres qui sont
disponibles pour les faire varier. d ) Rôle des actions correctrices1. Action Proportionnelle:
L'action proportionnelle permet de jouer sur la
vitesse de réponse du procédé. Plus le gain est élevé, plus la réponse s'accélère, plus l'erreur statique diminue (en proportionnel pur), mais plus la stabilité se dégrade. Il faut trouver un bon compromis entre vitesse et stabilité. Influence de l'action proportionnelle sur la réponse du processus à un échelon :
Remarque
: ces réponses sont celles d'un processus instable. Pour un processus stable,
l'erreur statique diminue quand KP augmente. 2. Action Intégrale :
L'action intégrale permet d'annuler l'erreur statique (écart entre la mesure et la consigne). Plus l'action intégrale est élevée (Ti petit), plus la
réponse s'accélère et plus la stabilité se dégrade. Il faut également trouver un bon compromis entre vitesse et stabilité. Rappel : Ti petit signifie une action
intégrale élevée. Influence de l'action intégrale sur la réponse du processus à un échelon :
3. Action Dérivée :
L'action dérivée est anticipatrice. En effet, elle
ajoute un terme qui tient compte de la vitesse de variation de l'écart, ce
qui permet d'anticiper en accélérant la réponse du processus lorsque l'écart
s'accroît et en le ralentissant lorsque l'écart diminue. Plus l'action dérivée est élevée (Td grand), plus la
réponse s'accélère. Là encore il faut trouver un bon compromis entre
vitesse et stabilité. Influence de l'action dérivée sur la réponse du processus à un échelon :
|
||||||||||||
|
||||||||||||
|
|